Computer Vision · Robotics
Fine-Grained Vision and ROS2 Robot Deployment
A collaborative deployment-focused computer-vision case study on recovering classifier performance after robot-camera domain shift.
Collaborative academic project · team-level results clearly labelled
Before adaptation
2.38%
After adaptation
95.24%
Verified endpoint comparison
Measured team-level robot-image accuracy before and after deployment-specific adaptation.
Scope
Role and problem
My role: Collaborative group project. My portfolio contribution focuses on robot-camera evaluation, adaptation analysis, and the deployment evidence I can defend.
A classifier trained on cleaner image data degraded sharply on robot-camera inputs. Lighting, viewpoint, scale, framing, and background conditions changed enough to expose a deployment gap that headline test accuracy concealed.
Architecture
System flow
Curated image dataset
Transfer-learning baseline
Robot-camera capture
Domain-shift diagnosis
Targeted augmentation
Deployment-specific fine-tuning
Confidence-aware ROS2 action mapping
Evidence
Measured signals
90.69%
21-class ResNet50 accuracy
Team-level fine-grained classification result across 21 pasta subclasses.
2.38% → 95.24%
Robot-image accuracy recovery
Team-level endpoint comparison before adaptation and after robot-image augmentation plus fine-tuning.
3 classes
Deployment subset
Fettuccine, fusilli, and penne were evaluated under robot-camera conditions.
Published Evidence
Selected artifacts.
Charts, screenshots, and media artifacts supporting this case study.
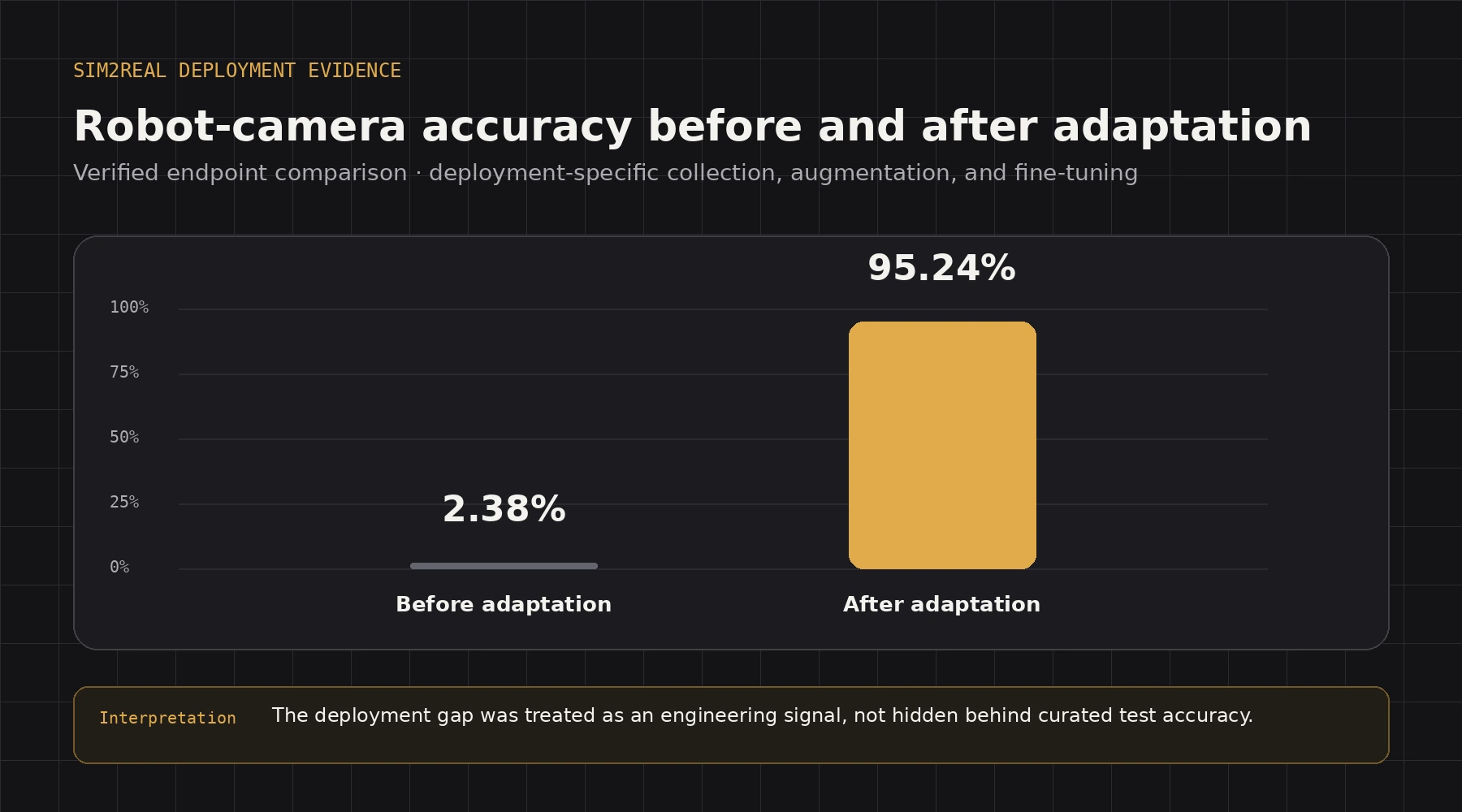
image evidence
Robot-image accuracy before and after adaptation
Verified team-level endpoint comparison: 2.38% before adaptation and 95.24% after robot-image augmentation and fine-tuning.
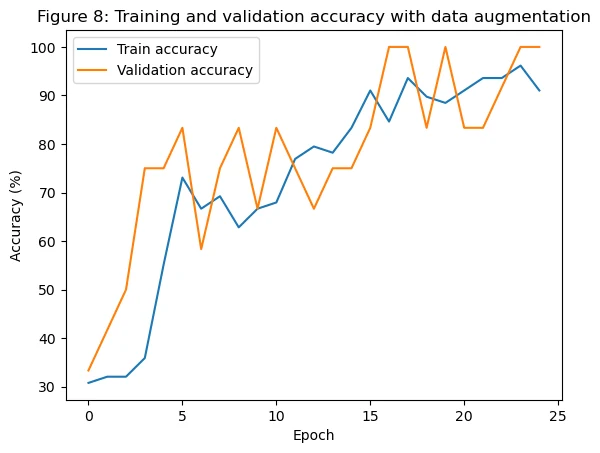
image evidence
Robot fine-tuning accuracy with augmentation
Exported from the executed notebook: training and validation accuracy across the robot-image fine-tuning run with augmentation.
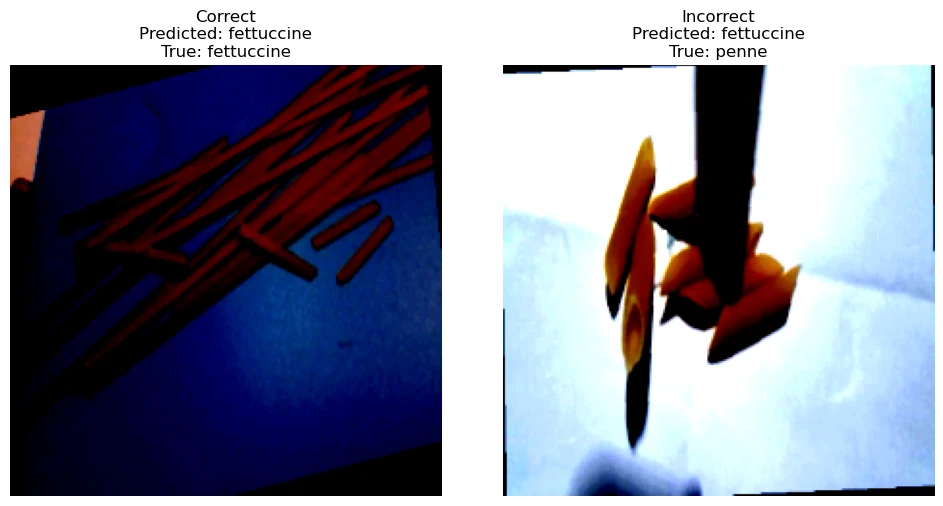
image evidence
Robot-camera prediction examples
Exported from the executed notebook: representative correct and incorrect predictions under deployment conditions.
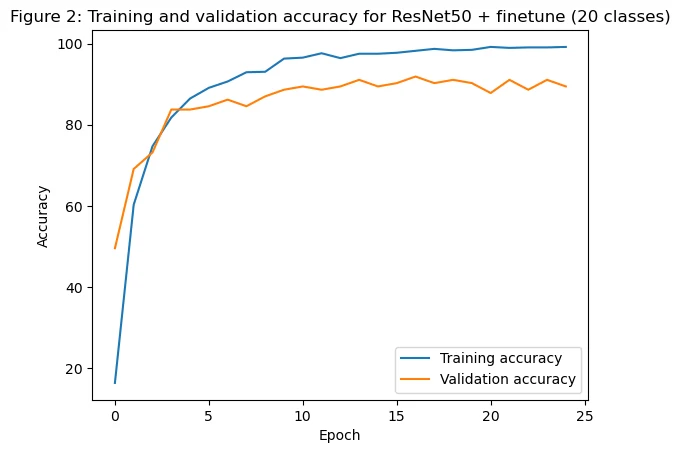
image evidence
Twenty-one-class ResNet50 training accuracy
Exported from the executed notebook: training and validation accuracy for the broader fine-grained classifier.
Contribution
- Contributed to the collaborative Phase 3 deployment workflow and the evaluation of robot-camera domain shift.
- Documented how targeted augmentation and fine-tuning changed the deployment result.
- Present the team-level metrics with explicit collaborative attribution rather than claiming sole ownership.
Lessons
- Domain shift should be designed for from the start, not patched at the end.
- A deployment metric can reveal a failure that a curated test set hides.
- Physical actions require explicit confidence boundaries.
Limitations
- The reported metrics are collaborative team-level outcomes.
- The current public artifacts show evaluation figures and deployment examples; a robot demo video can be linked separately when published.
- The deployment subset covers three pasta classes rather than the full twenty-one-class dataset.
Stack
- ROS2
- PyTorch
- ResNet50
- Transfer Learning
- Data Augmentation
- Sim2Real